Robotique et capteurs au service d'Ecophyto
WeedElec
Le projet
Le projet WeedElec propose une alternative au désherbage global chimique. Il combine un moyen aérien de détection des adventices par drone couplé à un robot à bras delta ECOROBOTIX équipé d’un outil de désherbage électrique haute tension.
- WeedElec a pour objectif de lever plus particulièrement les verrous scientifiques majeurs suivants :
 la détection/identification des adventices, en utilisant l’imagerie hyperspectrale et couleur, et des techniques associées de chimiométrie et d’apprentissage profond.
la détection/identification des adventices, en utilisant l’imagerie hyperspectrale et couleur, et des techniques associées de chimiométrie et d’apprentissage profond. - Le couplage de la détection aérienne et de la détection embarquée par le robot pour décider de l’élimination des adventices.
- Une étude approfondie du comportement des mauvaises herbes soumises à une décharge électrique haute tension en travaillant sur le couplage décharge électrique et impédance complexe des adventices avec leur phénologie.
Nous nous intéresserons aux effets environnementaux et de sécurité lies à l’utilisation de décharges électriques sur les adventices, afin de mettre en place une stratégie intégrée de désherbage sécurisée.
Le consortium
WeedElec est porté par un consortium de cinq partenaires, académiques et professionnels :
Irstea – UMR ITAP
![]()
Irstea, coordinateur du projet WeedElec, est l’Institut national de Recherche en Sciences et Technologies pour l’Environnement et l’Agriculture. Le Département Ecotechnologie, et l’UMR ITAP, collaborent étroitement avec le ministère de l’agriculture (Ecophyto 1 & 2, Agriculture 2025, AgGate) . Les équipes COMIC et PEPS seront impliquées.
CIRAD – Unités AMAP & AIDA

Le Cirad, qui dispose d’une expertise reconnue en malherbologie, participe depuis 2009 au développement de la plateforme de reconnaissance automatisé d’espèces végétales Pl@ntNet. Il mettra à profit son expertise, ses données et son infrastructure pour contribuer à lever le verrou d’identification d’espèces d’adventices.
INRIA - EPI ZENITH - LIRMM
![]() L’équipe projet Zenith de l’Inria (Institut National de Recherche en informatique et automatique) investit ses recherches sur les grands défis de gestion et d’analyse de données scientifique, sur les contraintes d’échelle (grands volumes de données, grandes applications logicielles), de complexité (données incertaines et multi-échelle multi-dimensions) et d’hétérogénéité (sémantique des données). L’équipe, qui travaille en étroite collaboration avec le Cirad sur le développement de la plateforme
L’équipe projet Zenith de l’Inria (Institut National de Recherche en informatique et automatique) investit ses recherches sur les grands défis de gestion et d’analyse de données scientifique, sur les contraintes d’échelle (grands volumes de données, grandes applications logicielles), de complexité (données incertaines et multi-échelle multi-dimensions) et d’hétérogénéité (sémantique des données). L’équipe, qui travaille en étroite collaboration avec le Cirad sur le développement de la plateforme
Pl@ntNet, investit sur le développement d’approches efficaces pour la détermination automatisées d’espèces végétales.
INRA - UMR EMMAH
L’UMR EMMAH mène des recherches pour analyser les impacts des changements globaux (climatiques & ut![]() ilisation des terres) sur les ressources en eau, la production agricole et leurs interactions, de l’échelle du champ à celle du paysage. Ces recherches s’appuient sur la modélisation des milieux et processus et le développement de méthodes/mesures d’observation du sol et des plantes (télé/proxy détection, géophysique pour la détermination des propriétés du sol et des plantes).
ilisation des terres) sur les ressources en eau, la production agricole et leurs interactions, de l’échelle du champ à celle du paysage. Ces recherches s’appuient sur la modélisation des milieux et processus et le développement de méthodes/mesures d’observation du sol et des plantes (télé/proxy détection, géophysique pour la détermination des propriétés du sol et des plantes).![]()
AGRIAL
 AGRIAL est l’un des premiers groupes coopératifs agricoles et agroalimentaires français (14 000 adhérents – grand Ouest de la France) et développe des activités de transformation agroalimentaire en Europe et à l’international, notamment les productions légumières. Agrial accompagne les adhérents dans leurs pratiques de production en leur fournissant services et expertises de façon à répondre aux enjeux économiques, sociaux et environnementaux de l’agriculture.
AGRIAL est l’un des premiers groupes coopératifs agricoles et agroalimentaires français (14 000 adhérents – grand Ouest de la France) et développe des activités de transformation agroalimentaire en Europe et à l’international, notamment les productions légumières. Agrial accompagne les adhérents dans leurs pratiques de production en leur fournissant services et expertises de façon à répondre aux enjeux économiques, sociaux et environnementaux de l’agriculture.
La solution WeedElec
Détection des adventices
La détection des adventices est un point clé de WeedElec. Les moyens à disposition peuvent être classés dans trois catégories selon le type d’information utilisée :
- Position spatiale des plantules : il s’agit de détecter les plantules en s’aidant de la distance fixe qui les sépare lors de la plantation et d’affiner ensuite leur détection autour de leur pré-positionnement à l’aide d’algorithme discriminant le sol et la végétation. Le plus souvent on utilise des techniques de segmentation couleur ou proche-infrarouge des images.

Une fois la plantule localisée tout ce qui sera détecté autour est alors classé comme adventice. Cette méthode est très efficace en plantation centimétrique (guidage laser) et à un stade de végétation très précoce. Toutefois, cette technique, qui ne permet pas d’individualiser les adventices sur le rang, ne sera utilisée qu’en première approche dans WeedElec.
 Identification taxonomique par apprentissage profond :
Identification taxonomique par apprentissage profond :
Les performances des algorithmes de reconnaissance d’image sont capables d’identifier une plante parmi des milliers d’autres avec des taux de reconnaissance élevés. Les derniers résultats dans ce domaine, montrent des taux de reconnaissances supérieurs à 85% (http://www.lifeclef.org/), et l’accès à ces techniques s’est largement popularisé ces dernières années, notamment à travers l’application mobile Pl@ntNet (www.plantnet-project.org ; Joly & al., 2016). Cette approche qui mobilise de grandes quantités de données, nécessite une puissance de calcul difficile à mobiliser sur une solution électronique embarquée. Les techniques par distillation de connaissance (Hinton & all, 2015) et de “transfer learning” (Carranza-Rojas & all, 2017) ou de “domain adaptation” (Tzeng & all, 2017) seront utilisées pour lever ce verrou.- Information spectrale : La technique de l’imagerie hyperspectrale (une à plusieurs centaines de bandes, associée à des traitements chimiométriques tels que la PLS-DA, a montré sa capacité à réaliser une discrimination efficace (Hadoux & all, 2014) entre mauvaises herbes et plants de culture. WeedElec se fondera principalement sur cette technique pour détecter les adventices par drone et en proxy détection.
Destruction des adventices
 Le principe du désherbage électrique a été étudié par Diprose (1984). Celui-ci a mis en évidence que l’énergie nécessaire à la destruction d’une plante est proportionnelle à sa taille et plus importante pour les plantes d’extérieur que celles sous serres. Irstea lors des projets PATCHWORK et D3E (années 1995-2000) avait déjà développé une technique spécifique de destruction électrique haute tension localisée des adventices.
Le principe du désherbage électrique a été étudié par Diprose (1984). Celui-ci a mis en évidence que l’énergie nécessaire à la destruction d’une plante est proportionnelle à sa taille et plus importante pour les plantes d’extérieur que celles sous serres. Irstea lors des projets PATCHWORK et D3E (années 1995-2000) avait déjà développé une technique spécifique de destruction électrique haute tension localisée des adventices.
Cependant, les caractéristiques d’impédance complexe électrique variables suivant les espèces induisent des comportements différents lorsque celles-ci sont soumises à la haute tension. WeedElec a pour objectif d’étudier ces caractéristiques pour générer le signal haute tension optimal d’un point de vue efficacité létale et consommation énergétique de l’outil.
La finalité de WeedElec
In fine, l’objectif global de WeedElec est d’assembler l’ensemble de ces solutions sur un robot pour obtenir une solution prototype viable et valorisable en totalité ou en modules indépendants auprès de l’industrie.

WeedElec est géo-positionné avec le réseau TERIA.
Les avancéees du projet - Interview de l'équipe - Janvier 2021

Dans le cadre de la rencontre terrain d’octobre 2020 nous avons résolu nos difficultés techniques de fiabilité et de précision du positionnement par GPS RTK. Cette précision impacte directement la qualité de la navigation dans les rangs de culture et la précision de pointage de la sonde HT sur les adventices détectés.
Nous avons par ailleurs amélioré la performance de détection des adventices et réalisé l’intégration des modèles dans une unité embarquée autonome (type Jetson).
Nous avons également travaillé à l’amélioration de notre électrode pour rendre l’action de désherbage plus performante.
Les essais sur le comportement des plantes aux décharges électriques ont été poursuivis, ainsi que la recherche d’algorithmes plus performants pour la discrimination hyperspectrale entre adventices et cultures.
Navigation du robot : notre première solution de navigation RTK est apparue peu fiable, avec des pertes très fréquentes du FIX et une précision de positionnement insuffisante pour notre application.
Après une discussion avec l’équipe du projet ROSEAU, nous avons choisi une solution qui permet aujourd’hui de garantir le positionnement centimétrique du robot. Elle s’est avérée fiable lors du dernier challenge.
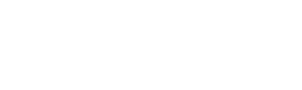
Nouvelle électrode et sa commande : nous avons testé et fiabilisé une nouvelle électrode et une commande sous 24v. L’augmentation de la tension de 12 à 24V permet d’augmenter la puissance et/ou de réduire le temps de traitement mais aussi de travailler à des fréquences de signaux plus efficaces quant à la létalité. Un nouvel étage de puissance est en cours de test pour atteindre ces objectifs.
La nouvelle électrode est équipée d’un tube protecteur en verre. Il permet de canaliser la décharge électrique et protéger ainsi les plantes voisines.

Nous avons ensuite travaillé à la sécurisation électrique du robot afin de protéger de façon optimale les personnes et le matériel électronique embarqué.
Les essais de comportement des adventices : des essais ont été réalisés avec la nouvelle électrode pour confirmer son efficacité dans la destruction des adventices.
Les dernières expérimentations confirment que sur des plantes âgées de 2 semaines, on retrouve l’efficacité démontrée précédemment : des plantes très sensibles (amaranthacées, polygonacées) et d’autres moins sensibles (poacées, brassicacées); les cultures n’étant pas détruites par l’arc électrique (à cet âge).
Une montée en fréquence du courant d’électrocution (possible avec la nouvelle version de la commande de l’électrode) de 420 Hz à 3 Khz n’a pas amélioré significativement l’efficience de destruction.
De même, une durée d’électrocution de 0.6s semble suffisante dans la plupart des cas comparée aux essais précédents qui utilisaient une durée d’électrocution de 1.2s.
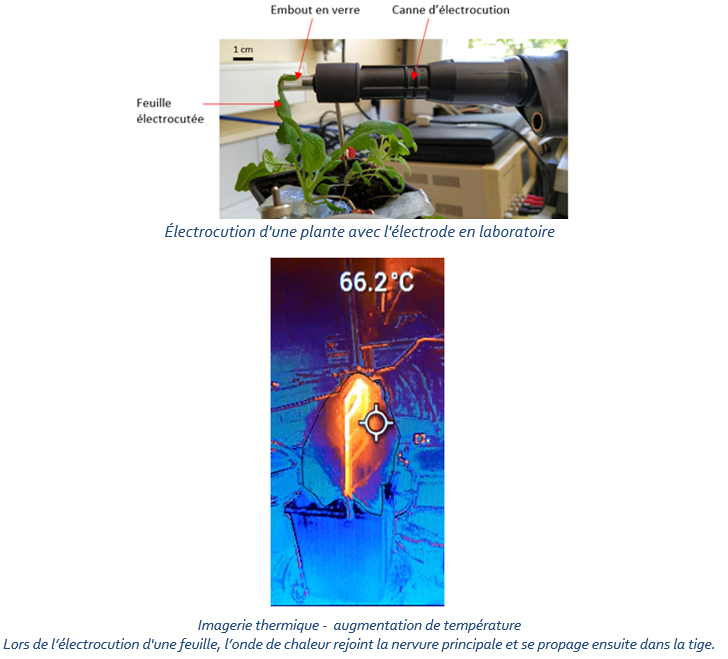
L’énergie électrique qui arrive en bas de la plante conditionne l’efficacité, cela peut provoquer un échauffement important comme montré avec des images thermiques lors d’une décharge électrique.
Détection des mauvaises herbes : le recours à une unité de calcul GPU autonome (Jetson, Nvidia) permet de s’affranchir du PC portable jusqu’à maintenant utilisé comme unité de calcul, et d’assurer ainsi une meilleure autonomie énergétique du robot, et surtout une meilleure autonomie de l’équipe en charge des développements robotiques. En effet, l’interface entre robot et module de détection est maintenant entièrement assurée dès la mise sous tension par des requêtes via le réseau Ethernet local.
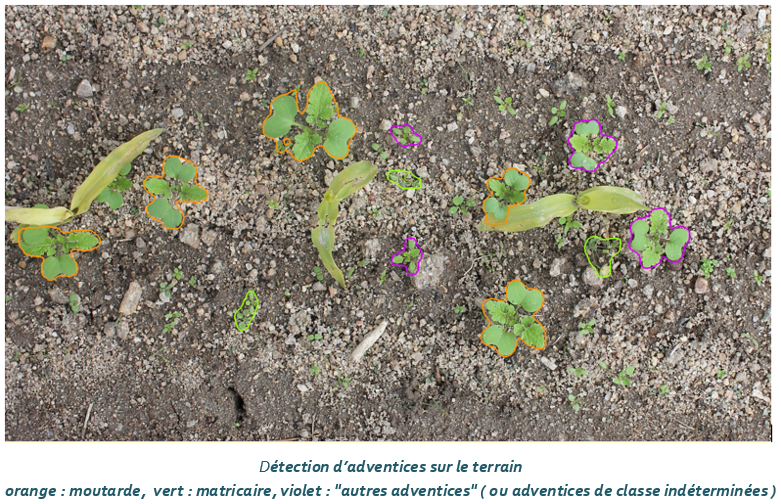
La performance globale de la détection semble désormais satisfaisante. L’ensemble des adventices est détecté par le système. Chaque adventice est bien individualisée spatialement, permettant au bras robotisé de pointer successivement les plantes à détruire. Par ailleurs, nous sommes actuellement en train d’optimiser la commande du bras afin qu’il puisse fonctionner plus rapidement et gagner en précision de positionnement.
Le concept même de notre robot exige en effet un positionnement à +- qq millimètres. Il s’agit d’un « désherbage chirurgical », qu’il va désormais falloir mettre en œuvre à grande échelle.
Les améliorations actuellement envisagées pour gagner en efficience et rapidité sont :
– Un recalage automatique avant pointage grâce à une caméra de confirmation située à proximité du bras (la caméra de détection est à l’avant du robot, nécessitant un déplacement du robot entre détection et destruction) ;
– Un contrôle adaptatif de la hauteur de déclenchement de la sonde HT lors de sa descente vers l’adventice, grâce à un capteur proxi-métrique ou via la détection du déclenchement lui-même.
 Pré-détection en hyperspectral par drône : cette partie avait été mise en sommeil en 2019, suite au constat que la prise d’image nécessitait un positionnement très précis du drone (altitude entre 4 et 6 mètres et vitesse d’évolution de l’ordre de 0.2 m/s) et donc la mise en place obligatoire d’un contrôle par GPS RTK.
Pré-détection en hyperspectral par drône : cette partie avait été mise en sommeil en 2019, suite au constat que la prise d’image nécessitait un positionnement très précis du drone (altitude entre 4 et 6 mètres et vitesse d’évolution de l’ordre de 0.2 m/s) et donc la mise en place obligatoire d’un contrôle par GPS RTK.
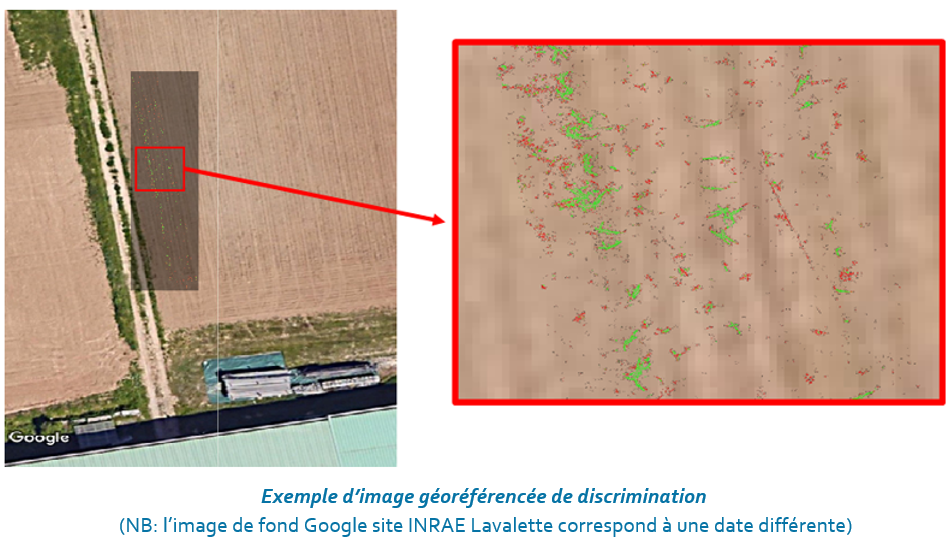
Afin de poursuivre les travaux en 2020, nous avons décidé de monter un portique sur le robot nous permettant de faire des images à une distance de 4m du sol, simulant ainsi une acquisition par drone ( la caméra hyperspectrale étant en mode autonome à 50 bandes).
Ce dispositif nous a permis d’acquérir des images sur site et de travailler sur les aspects suivants:
– Assemblage photogrammétrique des images acquises et production d’une orthophoto géoréférencée de la discrimination ;
– Détection automatique des rangs de culture.
La discrimination elle-même reste aujourd’hui plafonnée à un taux d’erreur (au niveau pixel) de l’ordre de 15% sur maïs et 20% sur haricots., mais ces chiffres devraient suffire pour une pré-détection des zones d’infestation. Une expérimentation sur drone équipé RTK est envisagée au printemps 2021.
On en parle
Le projet a fait l’objet d’une actualité sur le site national d’INRAE : “WeedElec, de la “haute couture” à la pointe du désherbage”
L’équipe a publié, courant 2020, dans la revue “Application in plant science”, un article mis en ligne (en open access) intitulé « Instance segmentation for the fine detection of crop and weed plants by precision agricultural robots ».
Mise en ligne à travers la plateforme Zenodo, en open access, un jeu de données annoté, destiné à l’apprentissage et à l’évaluation de techniques automatisées de détection d’adventices. Plus de 2 GB d’images sont ainsi désormais accessibles à la communauté scientifique pour ce type d’évaluation.
Les projets de recherche financés



WeedElec

Désherbage par procédé électrique haute tension combiné avec gestion prédictive et post évaluation par vision hyperspectrale sur drone