Robotique et capteurs au service d'Ecophyto
WeedElec
The project
The WeedElec project offers an alternative to global chemical weed control. It combines aerial means of weed detection by drone, coupled with a robot with ECOROBOTIX delta arms fitted with a high-voltage electrical weeding tool.
- WeedElec more particularly aims to overcome the following major scientific obstacles: weed detection/identification, using hyperspectral and colour imaging, and associated chemometric and deep learning techniques.
- Combining aerial detection and on-board detection by the robot to decide to eliminate weeds.
- An in-depth study of the behaviour of weeds subjected to a high-voltage electrical discharge, by investigating the relationship between the electrical discharge and the complex impedance and phenology of the weeds.
We are examining the environmental and safety effects of the use of electrical discharges on weeds, in order to create a safe, integrated weed control strategy.
The consortium
WeedElec is held by a consortium of five academic and professional partners :
Irstea – UMR ITAP
![]() Irstea, the coordinator of the WeedElec project, is the French National Research Institute of Science and Technology for Environment and Agriculture. The Ecotechnology Department and the ITAP Mixed Research Unit work closely with the French Ministry of Agriculture (Ecophyto 1 & 2, Agriculture 2025, AgGate). The COMIC and PEPS teams will be involved.
Irstea, the coordinator of the WeedElec project, is the French National Research Institute of Science and Technology for Environment and Agriculture. The Ecotechnology Department and the ITAP Mixed Research Unit work closely with the French Ministry of Agriculture (Ecophyto 1 & 2, Agriculture 2025, AgGate). The COMIC and PEPS teams will be involved.
CIRAD – AMAP & AIDA Units
 Cirad
CiradINRIA - EPI ZENITH - LIRMM
![]() The Inria (French National Institute for Research in computer science and control) Zenith project team focuses its research on the major challenges of scientific data management and analysis, constraints of scale (large volumes of data, large software applications), complexity (multi-dimension, multi-scale and uncertain data) and heterogeneity (data semantics). The team, which works closely with Cirad on the development of the Pl@ntNet platform, is investing in the development of effective approaches for automatically determining plant species.
The Inria (French National Institute for Research in computer science and control) Zenith project team focuses its research on the major challenges of scientific data management and analysis, constraints of scale (large volumes of data, large software applications), complexity (multi-dimension, multi-scale and uncertain data) and heterogeneity (data semantics). The team, which works closely with Cirad on the development of the Pl@ntNet platform, is investing in the development of effective approaches for automatically determining plant species.
INRA - UMR EMMAH
 The UMR EMMAH mixed research unit conducts research to analyse the impact of global changes (climate & land use) on water resources, agricultural production, and the interactions between them, at field and landscape level. This research is based on modelling environments and processes and developing observational methods/measurements of the soil and plants (remote/proximal sensing, geophysics to determine soil and plant properties).
The UMR EMMAH mixed research unit conducts research to analyse the impact of global changes (climate & land use) on water resources, agricultural production, and the interactions between them, at field and landscape level. This research is based on modelling environments and processes and developing observational methods/measurements of the soil and plants (remote/proximal sensing, geophysics to determine soil and plant properties).![]()
AGRIAL
 GRIAL is one of the biggest farming and agri-food cooperative groups in France (14,000 members in the Great West area of France) and is involved in agri-food processing activities in Europe and internationally, particularly vegetable production. Agrial supports members in their production practices by providing services and expertise to help them meet the economic, social and environmental challenges of farming.
GRIAL is one of the biggest farming and agri-food cooperative groups in France (14,000 members in the Great West area of France) and is involved in agri-food processing activities in Europe and internationally, particularly vegetable production. Agrial supports members in their production practices by providing services and expertise to help them meet the economic, social and environmental challenges of farming.
The WeedElec solution
Weed detection
Weed detection is a key feature of WeedElec. The detection means can be split into three categories depending on the type of information used :
- Spatial position of the seedlings : the seedlings are detected using the fixed distance between them at the time of planting, and
 detection is then refined around their pre-position using an algorithm that distinguishes between soil and vegetation. Techniques involving colour or near-infrared segmentation of the images are usually used.Once the seedling has been located, anything that is detected around it is classed as a weed. This method is very effective in laser-guided planting and at a very early stage of growth. However, this technique does not individually identify weeds in the row, and will only be used as an initial approach in WeedElec.
detection is then refined around their pre-position using an algorithm that distinguishes between soil and vegetation. Techniques involving colour or near-infrared segmentation of the images are usually used.Once the seedling has been located, anything that is detected around it is classed as a weed. This method is very effective in laser-guided planting and at a very early stage of growth. However, this technique does not individually identify weeds in the row, and will only be used as an initial approach in WeedElec.
- Taxonomic identification through deep learning :
 Image recognition algorithms are capable of identifying a plant out of thousands of others with high recognition rates. The latest results in this area show recognition rates of more than 85% (http://www.lifeclef.org/), and access to these techniques has become very widespread in recent years, particularly with the Pl@ntNet mobile application (www.plantnet-project.org; Joly & al., 2016). This approach, which calls on large quantities of data, requires processing power that is difficult to deploy in an embedded electronic solution. Knowledge distillation (Hinton et al., 2015) and transfer learning (Carranza-Rojas et al., 2017) or domain adaptation (Tzeng et al., 2017) techniques will be used to overcome this obstacle.
Image recognition algorithms are capable of identifying a plant out of thousands of others with high recognition rates. The latest results in this area show recognition rates of more than 85% (http://www.lifeclef.org/), and access to these techniques has become very widespread in recent years, particularly with the Pl@ntNet mobile application (www.plantnet-project.org; Joly & al., 2016). This approach, which calls on large quantities of data, requires processing power that is difficult to deploy in an embedded electronic solution. Knowledge distillation (Hinton et al., 2015) and transfer learning (Carranza-Rojas et al., 2017) or domain adaptation (Tzeng et al., 2017) techniques will be used to overcome this obstacle. - Spectral information : The technique of hyperspectral imaging (one to several hundred bands) combined with chemometric processing such as PLS-DA has been demonstrated to be capable of effective discrimination between weeds and crop plants (Hadoux et al., 2014). WeedElec will mainly use this technique as a basis for detecting weeds by drone and using proximal sensing.
Weed destruction
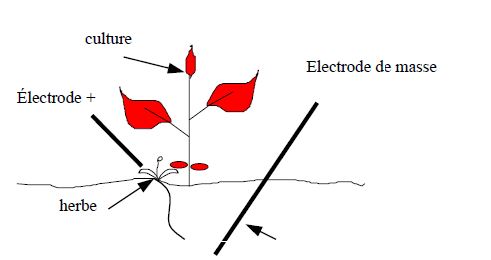 The principle of electrical weed control was examined by Diprose (1984). He highlighted that the energy necessary to destroy a plant is proportional to its size, and greater for outdoor plants than those in greenhouses. As part of the PATCHWORK and D3E projects (1995-2000), Irstea developed a specific technique for the localised high-voltage electrical destruction of weeds.
The principle of electrical weed control was examined by Diprose (1984). He highlighted that the energy necessary to destroy a plant is proportional to its size, and greater for outdoor plants than those in greenhouses. As part of the PATCHWORK and D3E projects (1995-2000), Irstea developed a specific technique for the localised high-voltage electrical destruction of weeds.
However, due to the varying complex impedance characteristics of different species, they behave differently when they are subjected to a high voltage. WeedElec aims to study these characteristics to generate the optimum high-voltage signal in terms of lethal efficacy and the power consumption of the tool.
The aim of WeedElec
Ultimately, the overall objective of WeedElec is to combine all of these solutions in a robot in order to obtain a viable prototype solution that can be developed as a whole or as independent modules with industry.

WeedElec is geo positioned with the TERIA network.
Funded research projects



WeedElec

Localised weeding robot using a high-voltage electrical method combined with predictive management and post-evaluation via drone-mounted hyperspectral vision