Robotique et capteurs au service d'Ecophyto
BIPBIP
The project
In vegetable crops and large-scale crops, managing weeds is a critical issue during the earliest stages of growth, and has significant implications in terms of quality and finances, as well as from an environmental point of view. The technical responses to this issue are either chemical or mechanical – or even manual – depending on the type and stage of the crop and whether it is being farmed organically or conventionally.

The BIPBIP project plans to develop a mechanical solution for early intra-row weeding of vegetable crops and large-scale crops. This solution is based on a hoeing tool-block that is automatically guided by imaging and telemetry, covering a single crop row. It uses a vision system that provides crop and weed plant positions, transmitted to a decision-making system that controls a mechanical device that performs the actual weeding.
The consortium
BIPBIP combines the imaging (IMS), robotics (LaBRI) and mechanical design (Elatec) skills necessary for the development of the tool-block. It is backed by the professional expertise of a farmer (Fermes Larrère) and the agronomic and experimental skills of a technical centre (CTIFL) required for producing specifications, performing tests and carrying out agronomic validation.
The IMS (Integration: from Material to Systems) laboratory and the MOTIVE team
IMS (UMR 5218, CNRS, Univ. Bordeaux, Bordeaux INP) is a laboratory centred on systems science and engineering. The MOTIVE team focuses in particular on designing algorithms for processing images acquired using multi/hyperspectral proximal or remote sensing, particularly in response to agronomic issues (estimating yield and vigour, detecting disease).




LaBRI (Bordeaux IT Research Laboratory) and the Rhoban project
LaBRI (UMR 5800, CNRS, Univ. Bordeaux, Bordeaux INP) is a laboratory centred on information science and technology. The Rhoban team specialises in robotics, and designs systems ranging from the humanoid robot (Robocup world champions) to robots for precision agriculture. Its achievements include designing a self-guided solution for inter-row hoeing, a vine-tying machine and a poplar planting robot.
Fermes Larrère
 Fermes Larrère produces and distributes conventionally and organically grown vegetables and cereal crops.
Fermes Larrère produces and distributes conventionally and organically grown vegetables and cereal crops.
The company’s main business is carrots, and most of its agronomic, environmental, economic and societal research in focused in this area. The Larrère group is the third largest producer of conventional carrots and the leading producer of organic carrots in France.
Elatec
 ELATEC designs and produces innovative mechanical devices in response to farmers’ needs, particularly in organic farming. It has developed a variety of mobile electrical machines (wheel base units, straddlers) and automatic electrical systems (harvesters, motor hoes). Its horticultural straddle robot won a prize at the 2015 Agrinove competition.
ELATEC designs and produces innovative mechanical devices in response to farmers’ needs, particularly in organic farming. It has developed a variety of mobile electrical machines (wheel base units, straddlers) and automatic electrical systems (harvesters, motor hoes). Its horticultural straddle robot won a prize at the 2015 Agrinove competition.
CTIFL - French interprofessional technical centre for fruit and vegetables
 CTIFL is a technical institute that carries out research and knowledge transfer relating to fruit and vegetable crops. It works in particular to develop innovative solutions such as, for example, mechanical thinning, fertilisation and irrigation tools. It continuously strives to find integrated, alternative plant protection methods.
CTIFL is a technical institute that carries out research and knowledge transfer relating to fruit and vegetable crops. It works in particular to develop innovative solutions such as, for example, mechanical thinning, fertilisation and irrigation tools. It continuously strives to find integrated, alternative plant protection methods.
The BIPBIP solution
Specifications
In order to ensure that it is effective and acceptable to the profession, the weed control system developed must be:
- compatible with multiple crops, farming methods and working conditions ;
- effective against weeds without damaging the surface condition of the soil ;
- applicable as of the first weeks after sowing, a critical period that determines the success of the crop ;
- fast enough to ensure sufficient work output.
In this framework, the crucial points are the choice of hoeing tools, the decision-making logic (distinguishing between crops/weeds and action strategy) and the action system (actuators and control). The carrier (autonomous robot or tractor) to be used is not crucial; the solution must above all be usable in different configurations of farm size, plot size, crop to be protected and method of farming these crops.
The BIPBIP tool-block
 The system to be developed is a precision imaging-assisted intra-row hoeing tool-block.
The system to be developed is a precision imaging-assisted intra-row hoeing tool-block.
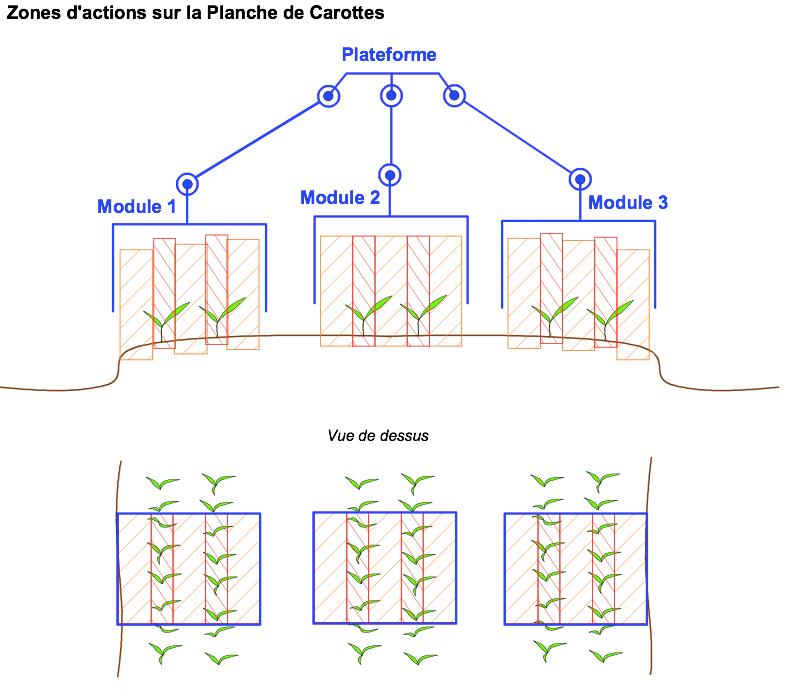
This tool-block will be dedicated to weeding a single row, or possibly a “double row”, as can be found in certain crops. It will operate in addition to inter-row weed control solutions, working in a zone 20 to 30 cm wide, weeding in the immediate vicinity of the row and in the spaces between the plants. This makes it possible to cover most vegetable crops (carrots, leeks, cabbages, etc.) and large-scale crops with wide inter-plant spacing (maize, sunflower, rape) in the early stages. In order to treat several rows at the same time, several tool-blocks can be installed in parallel and work abreast.
Each tool-block will be made up of three assemblies:
- a computer vision module detecting the positions of the rows, crops and weeds and transmitting them to the tool-block general control system; it will be based on an RGB camera operating in an “opaque tunnel”, lit by panels of LEDs, and on row detection algorithms (for guidance along the line) and supervised classification algorithms (to distinguish between plants/weeds).

- a configurable tool-block: electric actuators (accurate and fast) and different tools to suit multiple configurations, i.e. fixed hoeing tools for the edges of the row and the space between rows, and mobile, mechanical or thermal (laser) tools;
- a tool-block control system that controls the tools and orders the destruction of the weeds, on the basis of the information received from the vision module and other sensors (telemetric sensor and inertial sensor unit), while optimising the mechanical stress, power requirements and work output.
The tool-block must be simple and robust, and usable by operators who are not familiar with embedded precision technology. The direct consideration is the provision of an item of field equipment that can be put into operation on farms quickly and is easy to use.
For more information
PhD
Lac (2022) Méthodes de vision par ordinateur et d’apprentissage profond pour la localisation, le suivi et l’analyse de la structure de plantes. Application au désherbage de précision. (Computer vision and deep learning methods for localisation, tracking and analysis of plant structure. Application to precision weeding). PhD, Univ. Bordeaux.
International peer-reviewed journal articles
Lac L., Keresztes B., Louargant M., Donias M., Da Costa J.-P. (2022). An annotated image dataset of vegetable crops at an early stage of growth for proximal sensing applications. Data in Brief, Volume 42, 108035. https://doi.org/10.1016/j.dib.2022.108035
Lac L., Da Costa J.-P., Donias M., Keresztes B., Bardet A. (2022). Crop stem detection and tracking for precision hoeing using deep learning. Computers and Electronics in Agriculture, Volume 192, 106606, ISSN 0168-1699, https://doi.org/10.1016/j.compag.2021.106606.
Articles/Communications in international peer-reviewed conferences
Louargant M., Lac L., Da Costa J.-P., Donias M., Keresztes B., Gimbert H., N’Guyen, Labriffe E., Bondu L., Kaçar F. (2022). BIPBIP: a mechanical and automated intra-row weeding solution. Accepted at the Int. Symposium on Mechanization, Precision Horticulture and Robotics: Precision and Digital Horticulture in Field Environment. International Horticultural Congress, Angers, France, August 2022.
Lac L., Da Costa J.-P., Donias M., Keresztes B., Louargant M. (2021). SDNet: Unconstrained Object Structure Detector Network for In-Field Real-Time Crop Part Location And Phenotyping. British Machine Vision Conference, United Kingdom. Online presentation.
Lac L., Gréteau G., Keresztes B., Rançon F., Bardet A., Da Costa J.P. (2019). Embedded vision system and algorithms for early weed vs. crop discrimination within the row. Proceedings of ECPA 2019, Montpellier, France.
Communication in national events without proceedings
Da Costa J.-P., Barbosa V. (2021). BIPBIP, un projet en lice dans le Challenge ANR ROSE. Journée technique : Quoi de neuf en Bio ? Lycée Agricole de Sabres, Décembre 2021.
Barbosa V., Da Costa J.-P. (2019). Désherbage intra-rang : le Challenge ROSE et le projet BIPBIP. 3RDF. Robots : acteurs d’une agriculture du futur ? Lycée Agricole des Vaseix. Décembre 2019.
Da Costa J.-P. (2019). BIPBIP : un module robotisé pour le désherbage intra-rang précoce. 5ème edition des Etats Généraux de l’Innovation : l’émergence des robots dans les exploitations agricoles. Bordeaux, Juin 2019
Da Costa J.-P. (2019). BIPBIP : un module robotisé pour le désherbage intra-rang. Journée de rencontre recherche-industrie : Technologies pour le désherbage Intra-rang. IRSTEA Montoldre, Septembre 2019.
J.-P. Da Costa et al., BIPBIP – Bloc-outil et Imagerie de Précision pour le Binage Intra-rang Précoce. Journée Méca F&L, Mai 2018.
Other communication actions
Michau L., Kaçar F., Louargant M., Lac L., Da Costa J.-P., Donias M., Keresztes B., Gimbert H., N’Guyen S., Labriffe E., 2022. BIPBIP – Une solution de désherbage mécanique intra-rang et automatisé. Infos CTIFL n°385, octobre 2022. DEMO Robot : E-tract: a robust autonomous electric tractor au FIRA 2021 (décembre) par Hugo Gimbert et Marine Louargant. Démonstration available online: https://www.youtube.com/watch?v=qFA4BD2zSik&t=165s
Data set: Lac, Louis (2022), “Vegetable Crops Dataset for Proximal Sensing (VCD)”, Mendeley Data, V1, doi: 10.17632/d7kbzjr83k.1
Sofwares: SDNet (Structure Dtection Network : réseau de détection de structures de plantes à un stade précoce). Lien : https://github.com/laclouis5/StructureDetector
Funded research projects



WeedElec

Localised weeding robot using a high-voltage electrical method combined with predictive management and post-evaluation via drone-mounted hyperspectral vision