Robotique et capteurs au service d'Ecophyto
BIPBIP
Le projet
En cultures maraîchères et grandes cultures, la gestion des adventices est une question critique lors des stades de culture les plus précoces, ayant des implications fortes du point de vue qualitatif et financier mais également sur le plan écologique. Les réponses techniques à cette question sont soit chimiques, soit mécaniques voire manuelles, selon le type et le stade de culture ou l’itinéraire technique choisi, biologique ou conventionnel.

Le projet BIPBIP propose de développer une solution mécanique pour le désherbage intra-rang de cultures maraîchères et de grandes cultures au stade précoce. Cette solution repose sur un bloc-outil de binage autoguidé par imagerie et télémétrie, couvrant un rang de culture. Il s’appuie sur un système de vision fournissant les positions des cultures et adventices, transmises à un système décisionnel contrôlant un dispositif mécanique réalisant le désherbage proprement dit.
Le consortium
BIPBIP allie les compétences en imagerie (IMS), robotique (LaBRI) et conception mécanique (Elatec) nécessaires au développement du bloc outil. Il bénéficie de l’expertise professionnelle d’un producteur (Fermes Larrère) et de la compétence agronomique et expérimentale d’un centre technique (CTIFL) nécessaires à l’expression de spécifications, à la conduite d’essais et à la validation agronomique.
Le laboratoire IMS (Intégration du Matériau au Système) et l’équipe MOTIVE
IMS (UMR 5218, CNRS, Univ. Bordeaux, Bordeaux INP) est une unité centrée sur les sciences et l’ingénierie des systèmes. L’équipe MOTIVE vise en particulier à la conception d’algorithmes pour le traitement d’images, acquises en proxi ou télédétection multi/hyperspectrale, en réponse notamment à des problématiques agronomiques (estimation de rendement, de vigueur, détection de maladie).




Le LaBRI (Laboratoire Bordelais de Recherche en Informatique) et le projet Rhoban
Le LaBRI (UMR 5800, CNRS, Univ. Bordeaux, Bordeaux INP) est centré sur les sciences et technologies de l’information. Spécialisée en robotique, l’équipe Rhoban conçoit des systèmes, allant du robot humanoïde (champion du monde Robocup) aux robots pour l’agriculture de précision. Elle a notamment conçu une solution autoguidée pour le binage inter-rang, une palisseuse pour la vigne et un robot planteur de peupliers.



Les Fermes Larrère
Les Fermes Larrère produisent et commercialisent des légumes et des céréales en culture conventionnelle et biologique.
Activité principale de l’entreprise, la carotte concentre la majorité des efforts en matière de recherche agronomique, environnementale, économique et sociétale. Le groupe Larrère est le 3ème acteur national sur la carotte conventionnelle et le 1er sur la carotte biologique.
Elatec
 L’entreprise ELATEC conçoit et réalise des dispositifs mécaniques innovants, en réponse aux besoins des exploitants, en particulier en agriculture Bio. Elle a développé une variété de machines mobiles électriques (chariots, enjambeurs) et de systèmes automatiques électriques (récolteuses, motobineuses). Son robot maraîcher enjambeur a notamment reçu un prix au concours Agrinove 2015.
L’entreprise ELATEC conçoit et réalise des dispositifs mécaniques innovants, en réponse aux besoins des exploitants, en particulier en agriculture Bio. Elle a développé une variété de machines mobiles électriques (chariots, enjambeurs) et de systèmes automatiques électriques (récolteuses, motobineuses). Son robot maraîcher enjambeur a notamment reçu un prix au concours Agrinove 2015.
Centre Technique Interprofessionnel des fruits et légumes
 Le CTIFL est un institut technique menant des actions de recherche et de transfert pour les cultures fruitières et légumières. Ses travaux visent notamment à la mise au point de solutions innovantes comme, par exemple, des outils raisonnés d’éclaircissage mécanique, de fertilisation ou d’irrigation. La recherche de méthodes de protection phytosanitaire intégrées et alternatives y est permanente.
Le CTIFL est un institut technique menant des actions de recherche et de transfert pour les cultures fruitières et légumières. Ses travaux visent notamment à la mise au point de solutions innovantes comme, par exemple, des outils raisonnés d’éclaircissage mécanique, de fertilisation ou d’irrigation. La recherche de méthodes de protection phytosanitaire intégrées et alternatives y est permanente.
La solution BIPBIP
Le cahier des charges
Afin de garantir son efficacité et son acceptabilité par la profession, le système de désherbage à développer se doit d’être :
- compatible avec de multiples cultures, itinéraires techniques et conditions de travail ;
- efficace sur les adventices sans détériorer l’état de surface du sol ;
- applicable dès les premières semaines après le semis, période critique dont dépend la réussite de la culture,
- suffisamment rapide pour assurer un débit de chantier suffisant.
Dans ce schéma, les points cruciaux sont le choix des outils binage, la logique décisionnelle (discrimination cultures/adventices et stratégie d’action) et le système d’action (actionneurs et pilotage). Le porteur (robot autonome ou tracteur) à utiliser n’est pas crucial ; la solution devra avant tout être utilisable dans différentes configurations de taille d’exploitation, de taille de parcelle, de culture à protéger que de mode de conduite de ces cultures.
Le bloc-outil BIPBIP
Le système à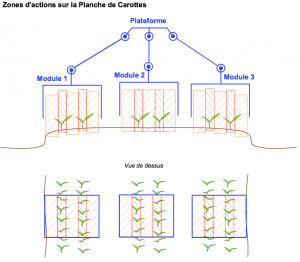 développer est un bloc-outil de binage intra-rang assisté par imagerie de précision.
développer est un bloc-outil de binage intra-rang assisté par imagerie de précision.
Ce bloc-outil sera dédié au désherbage d’un rang unique, voire d’un “double rang” comme on peut en rencontrer sur certaines cultures. Il se posera en complément des solutions de désherbage inter-rang, travaillant dans une zone de 20 à 30 cm de large, désherbant à proximité immédiate du rang et dans les espaces entre les plants. Cela permet de couvrir la plupart des cultures maraîchères (carottes, poireaux, choux, etc.) et des grandes cultures à distance inter-plantes importante (maïs, tournesol, colza) aux stades précoces. Afin de traiter plusieurs rangs simultanément, plusieurs blocs-outils pourront être installés en parallèle et travailler de front.
Chaque bloc-outil sera constitué de 3 ensembles :
- un module de vision par ordinateur détectant la position des rangs, des cultures et des adventices et les transmettant au système de contrôle général du bloc outil ; il s’appuiera sur une caméra RVB opérant dans un « tunnel opaque », éclairée par des panneaux de LEDs, et sur des algorithmes de détection de rangs (pour le guidage sur la ligne) et de classification supervisée (pour la discrimination plantes/adventices).

- un bloc-outil configurable : actionneurs électriques (précis et rapides) et différents outils pour s’adapter à des configurations multiples : outils fixes de binage pour les bords du rang et l’interligne, outils mobiles, mécaniques ou thermiques (laser) ;
- un système de contrôle du bloc-outil assurant le pilotage des outils et commandant la destruction des adventices, sur la base des informations reçues du module de vision et d’autres capteurs (capteur télémétrique et centrale inertielle), tout en optimisant les efforts mécaniques, les besoins énergétiques et le débit de chantier.
Le bloc outil devra être simple et robuste, utilisable par des opérateurs non familiarisés avec les technologies de précision embarquées. La contrepartie directe est la mise à disposition d’un matériel de terrain opérationnel rapidement sur les exploitations avec une prise en main facilitée.
Pour en savoir plus
Mémoire de thèse
Lac (2022) Méthodes de vision par ordinateur et d’apprentissage profond pour la localisation, le suivi et l’analyse de la structure de plantes. Application au désherbage de précision. Doctorat, Univ. Bordeaux.
Articles de revue internationale à comité de lecture
Lac L., Keresztes B., Louargant M., Donias M., Da Costa J.-P. (2022). An annotated image dataset of vegetable crops at an early stage of growth for proximal sensing applications. Data in Brief, Volume 42, 108035. https://doi.org/10.1016/j.dib.2022.108035
Lac L., Da Costa J.-P., Donias M., Keresztes B., Bardet A. (2022). Crop stem detection and tracking for precision hoeing using deep learning. Computers and Electronics in Agriculture, Volume 192, 106606, ISSN 0168-1699, https://doi.org/10.1016/j.compag.2021.106606.
Articles/Communications en conférences internationales à comité de lecture
Louargant M., Lac L., Da Costa J.-P., Donias M., Keresztes B., Gimbert H., N’Guyen, Labriffe E., Bondu L., Kaçar F. (2022). BIPBIP: a mechanical and automated intra-row weeding solution. Accepted at the Int. Symposium on Mechanization, Precision Horticulture and Robotics: Precision and Digital Horticulture in Field Environment. International Horticultural Congress, Angers, France, August 2022.
Lac L., Da Costa J.-P., Donias M., Keresztes B., Louargant M. (2021). SDNet: Unconstrained Object Structure Detector Network for In-Field Real-Time Crop Part Location And Phenotyping. British Machine Vision Conference, United Kingdom. Online presentation.
Lac L., Gréteau G., Keresztes B., Rançon F., Bardet A., Da Costa J.P. (2019). Embedded vision system and algorithms for early weed vs. crop discrimination within the row. Proceedings of ECPA 2019, Montpellier, France.
Communications à des manifestations nationales sans actes
Da Costa J.-P., Barbosa V. (2021). BIPBIP, un projet en lice dans le Challenge ANR ROSE. Journée technique : Quoi de neuf en Bio ? Lycée Agricole de Sabres, Décembre 2021.
Barbosa V., Da Costa J.-P. (2019). Désherbage intra-rang : le Challenge ROSE et le projet BIPBIP. 3RDF. Robots : acteurs d’une agriculture du futur ? Lycée Agricole des Vaseix. Décembre 2019.
Da Costa J.-P. (2019). BIPBIP : un module robotisé pour le désherbage intra-rang précoce. 5ème edition des Etats Généraux de l’Innovation : l’émergence des robots dans les exploitations agricoles. Bordeaux, Juin 2019
Da Costa J.-P. (2019). BIPBIP : un module robotisé pour le désherbage intra-rang. Journée de rencontre recherche-industrie : Technologies pour le désherbage Intra-rang. IRSTEA Montoldre, Septembre 2019.
J.-P. Da Costa et al., BIPBIP – Bloc-outil et Imagerie de Précision pour le Binage Intra-rang Précoce. Journée Méca F&L, Mai 2018.
Autres communications
Michau L., Kaçar F., Louargant M., Lac L., Da Costa J.-P., Donias M., Keresztes B., Gimbert H., N’Guyen S., Labriffe E., 2022. BIPBIP – Une solution de désherbage mécanique intra-rang et automatisé. Infos CTIFL n°385, octobre 2022. DEMO Robot : E-tract: a robust autonomous electric tractor au FIRA 2021 (décembre) par Hugo Gimbert et Marine Louargant. Démonstration disponible en ligne : https://www.youtube.com/watch?v=qFA4BD2zSik&t=165s
Jeu de données Lac, Louis (2022), “Vegetable Crops Dataset for Proximal Sensing (VCD)”, Mendeley Data, V1, doi: 10.17632/d7kbzjr83k.1
Logiciels SDNet (Structure Dtection Network : réseau de détection de structures de plantes à un stade précoce). Lien : https://github.com/laclouis5/StructureDetector
Les projets de recherche financés



WeedElec

Désherbage par procédé électrique haute tension combiné avec gestion prédictive et post évaluation par vision hyperspectrale sur drone