Robotique et capteurs au service d'Ecophyto
PEAD
The project
The PEAD project aims to develop an autonomous robotic solution for systematic inter- and intra-row crop hoeing, with the ambition of reducing the use of herbicides linked to crops by 100%.
This project addresses significant scientific obstacles relating both to the robustness and accuracy of detection of plants and weeds, and to the regularity of intervention in variable observability, weed variability, development stage, environmental and soil conditions. The project also relates to long-term data collection to produce multi-scale maps that could be used for improved sustainable management of weed flora and cultivation development.
The consortium
The consortium is made up of three partners :
The XLIM Institute
 The XLIM Institute (project holder) is a mixed research unit (UMR) CNRS 7252, with multiple sites (Limoges, Poitiers, Brive, Angoulême) covering six subject groups organised into around twenty research teams. XLIM’s research activities cover a wide range of scientific fields: electronics and high frequencies, photonics, mathematics, information technology, imaging and communicating systems, and cross-disciplinary research.
The XLIM Institute (project holder) is a mixed research unit (UMR) CNRS 7252, with multiple sites (Limoges, Poitiers, Brive, Angoulême) covering six subject groups organised into around twenty research teams. XLIM’s research activities cover a wide range of scientific fields: electronics and high frequencies, photonics, mathematics, information technology, imaging and communicating systems, and cross-disciplinary research.
The team involved in this project, REMIX (robotics and mechatronics) in the SRI (intelligent systems and networks) group, has skills that cover dynamic system modelling, observability and control, perception and location, embedded systems and robotic mechanisms. The activities performed by REMIX are characterised by consideration of the entire chain, from perception to the execution of a task in real conditions (Real Robots in Real Worlds).
CARBON BEE
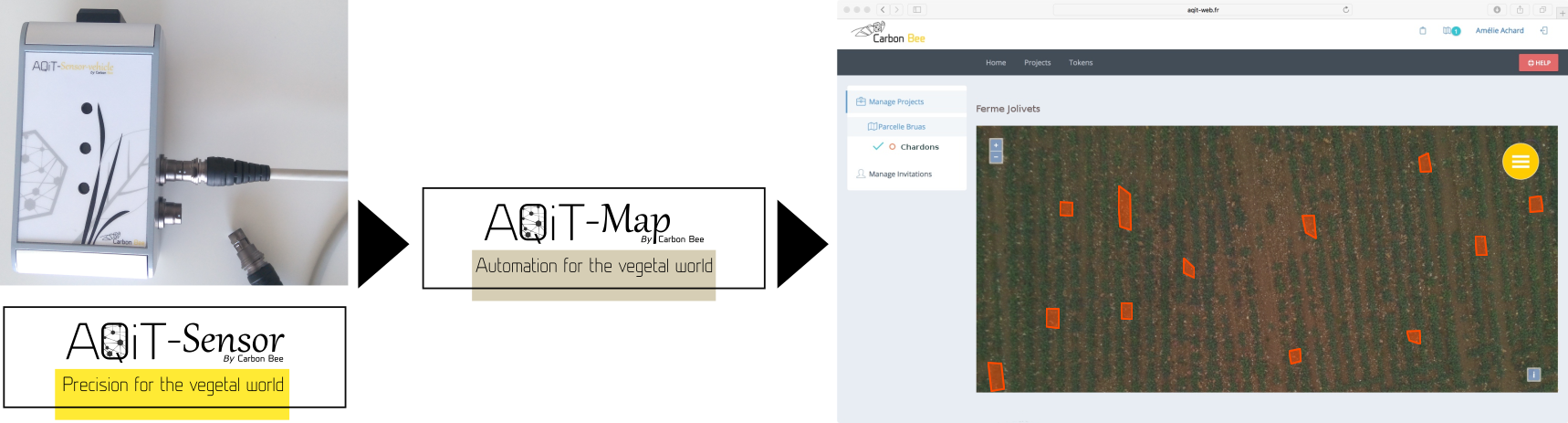
 CARBON BEE and its agronomy subsidiary Carbon Bee AgTech are French innovative start-ups founded in January 2015 (recognised as JEI (innovative start-ups) since 2016), based in St Marcel Les Valence in the Drôme region. Carbon Bee is a design firm in the fields of electronics and embedded computing, and an artificial intelligence research laboratory. It has developed a hyperspectral imaging solution coupled with software processing using Deep Learning. Carbon Bee AgTech is responsible for marketing and developing this imaging solution in agricultural science to enhance plant quality and health.
CARBON BEE and its agronomy subsidiary Carbon Bee AgTech are French innovative start-ups founded in January 2015 (recognised as JEI (innovative start-ups) since 2016), based in St Marcel Les Valence in the Drôme region. Carbon Bee is a design firm in the fields of electronics and embedded computing, and an artificial intelligence research laboratory. It has developed a hyperspectral imaging solution coupled with software processing using Deep Learning. Carbon Bee AgTech is responsible for marketing and developing this imaging solution in agricultural science to enhance plant quality and health.
SABI AGRI
 SABI AGRI is a company that designs, builds and markets innovative agricultural equipment for agro-ecological practices. Its leading product, the ALPO robotable electric tractor (450 kg, 25 hp, patented architecture) is specially designed for agricultural work. The tractor has an open-source software architecture centred on the ROS (Robot Operating System), giving it a wide variety of applications. SABI AGRI can also offer hoeing effectors suitable for robotic control. It has vegetable test and experimental plots, with access to maize, sunflower and beetroot plots on request.
SABI AGRI is a company that designs, builds and markets innovative agricultural equipment for agro-ecological practices. Its leading product, the ALPO robotable electric tractor (450 kg, 25 hp, patented architecture) is specially designed for agricultural work. The tractor has an open-source software architecture centred on the ROS (Robot Operating System), giving it a wide variety of applications. SABI AGRI can also offer hoeing effectors suitable for robotic control. It has vegetable test and experimental plots, with access to maize, sunflower and beetroot plots on request.
The PEAD solution
The PEAD project’s proposal covers the three facets of the ROSE Challenge request for proposals :
- “improved observation”, by providing solutions for automatic detection and plant/weed differentiation by learning ;
- “interpretation/decision-making”, with reliable, robust decision-making based on a learner network ;
- “action and intervention” in a targeted manner, by performing systematic, regular hoeing of weeds and protecting the crop plants.
The PEAD project deals with aspects relating to unanswered basic research issues, and also aims to incorporate solutions into an experimental platform in real operating conditions. The features incorporated should in particular be robust, usable on all types of soil and terrain, on all types of weedable crop, including sown crops (sunflower, beetroot, maize, vegetables and perfume, aromatic and medicinal plants), autonomously, including at night, and without any operator intervention.
Proceedings by PEAD consortium
Autonomous Vision-Based Navigation and Control for Intra-Row Weeding – Avilès, J., Soto, D., Stéphant, J., Labbani-I., O., 2022 IEEE 18th International Conference on Automation Science and Engineering (CASE) (proceedings très prochainement)
A proposal was submitted to IEEE ICRA 2023 (international conference on Robotics and Automation) https://www.icra2023.org/ : YoCo v1: Real-time Crop Instance Segmentation – Jesus Franco-Robles, Jorge E. Avilès-Mejia and Ouiddad Labbani-Igbida
Also see this video : https://youtu.be/h5-K3tY1VR8
Funded research projects



WeedElec

Localised weeding robot using a high-voltage electrical method combined with predictive management and post-evaluation via drone-mounted hyperspectral vision